Edge Reasoning Architecture
Distributed intelligence across Cortex, Neuron, and Synapse layers
System Architecture Layers
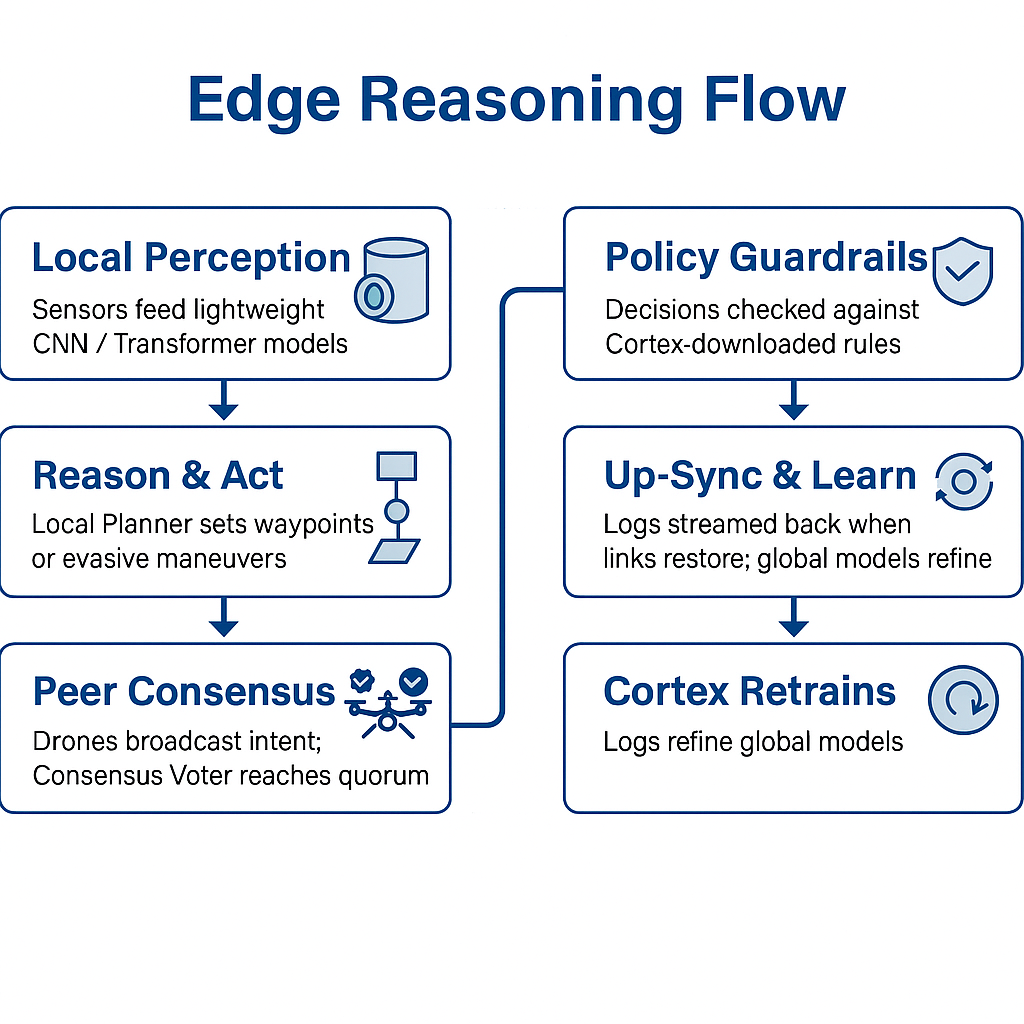
Edge Reasoning Flow Process
Local Perception
Camera, LiDAR, and IMU feed MobileNet-V3 + TinyBERT-6 for environmental understanding
Reason & Act
RRT-Connect generates collision-free paths; evasive maneuvers dispatched instantly
Peer Consensus
Trimmed PBFT achieves quorum < 200ms for formation or task changes
Policy Guardrails
Edge decisions checked against Cortex-pushed ROE & geofences
Up-Sync & Learn
Logs and edge triggers streamed back when links restore; Cortex retrains models incrementally
Intelligent Reasoning Containers
Local Planner
Generates motion paths in real time using sensor fusion, powered by advanced pathfinding algorithms for 3D environments.
Threat Evaluator
Assesses dynamic risks using machine learning for rapid classification and threat prioritization.
Consensus Voter
Coordinates swarm behavior via consensus protocols, achieving quorum in under 200ms over LoRa networks.
Local Perception
Optimized neural networks for object detection and context awareness, designed for power efficiency under 5W.
Key Benefits of Distributed Reasoning
Reduced Latency
Immediate threat response without cloud round-trip delays
Resilience
Swarm continues in RF-denied or spoofed environments
Scalability
Compute load scales horizontally with node count
Data Security
Raw sensor data stays on board; only insights transmit
Design Considerations & Constraints
Edge model footprint vs CPU/NPU & thermal limits optimization
Deterministic fallback (Return-to-Base) on container failure scenarios
Lightweight consensus vs role hierarchy for conflict resolution
Explainable logs for audit and compliance requirements
Differential model updates to conserve bandwidth and reduce latency
Transforming Drones into Thinking Agents
Synapse's distributed reasoning architecture enables autonomous drones to act independently with precision, while still collaborating effectively as a swarm. Its modular containers—including Local Planner, Threat Evaluator, Consensus Voter, and Perception engines—are lightweight, mission-configurable, and optimized for real-time decision-making.
Each node processes environmental inputs, makes context-aware choices, and participates in quorum-based coordination, even in degraded or disconnected conditions. This architecture transforms each drone from a remote endpoint into a thinking, adapting agent.